
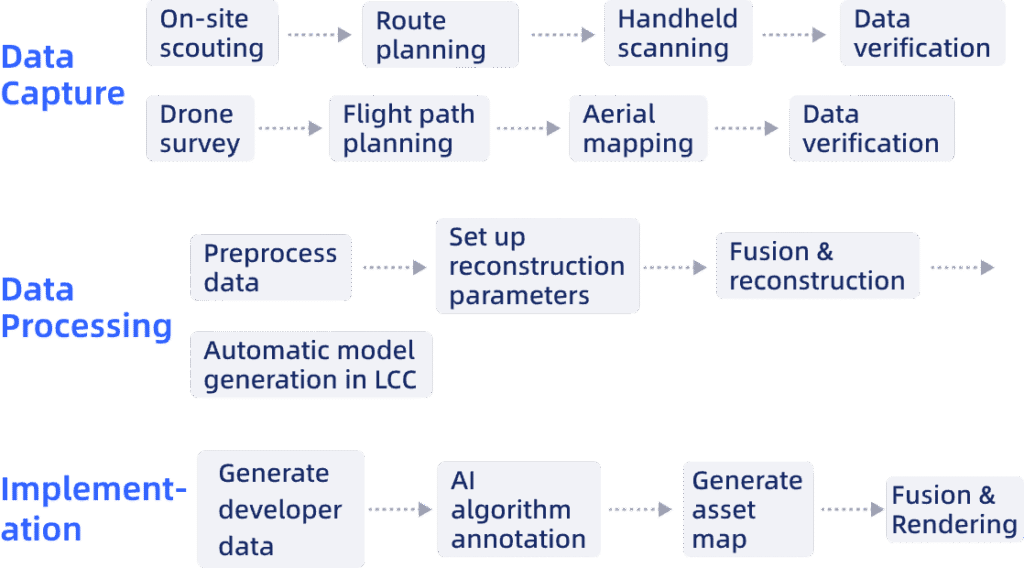
Offline Robot/Drone Simulation
Automatically generate a comprehensive asset map using spatial computing and rapidly develop simulation applications based on 3D reality models.
Application Scenarios
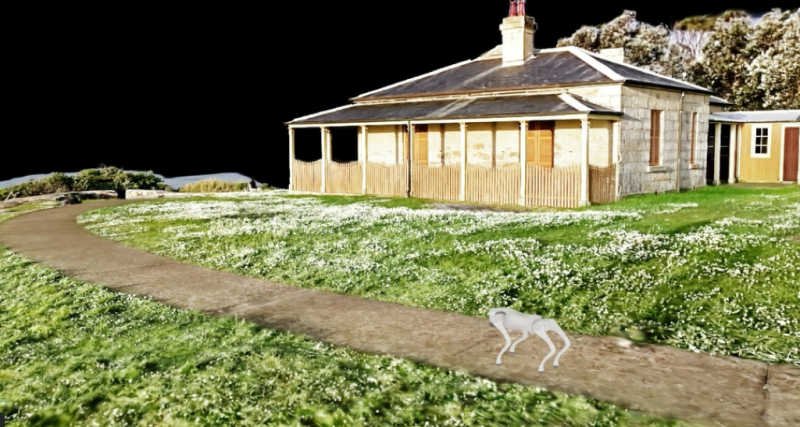
Visual Algorithm Training: Build photorealistic 3D environments with pixel-perfect ground truth for training perception, segmentation, and SLAM algorithms.
Asset Digitization: Implement automatic object recognition during data processing in LCC to generate precise spatial positioning of assets.
Autonomous Planning: Extract traversable surfaces, identify inspection points, and generate optimal path sequences with minimal supervision.
Physics-Based Simulation: Enable high-fidelity collision detection, sensor simulation, and coverage analysis for mission validation pre-deployment.
Challenges Addressed
Environmental Complexity: Conventional simulators struggle with accurate scene representation, requiring separate development of visual and depth data (LiDAR) that rarely align perfectly.
Resource Intensity: Accurate simulation demands complete real-world environment reconstruction. Traditional CAD and basic point cloud/mesh methods are slow and ineffective for algorithm training.
Interactive Experience: Conventional simulations typically use point-cloud models that don't align with human visual perception, creating usability gaps in human-machine interactions.
Outdated Inventory: Detect disease outbreaks, illegal harvesting, and growth patterns as they occur, not months afterward.
The XGRIDS Advantage

Comprehensive Viewpoint Coverage
Combined drone and handheld scanning captures aerial, ground, and interior perspectives without model stitching artifacts.
True-to-Life Rendering
Proprietary LiDAR + visual Multi-SLAM fusion algorithms excel with challenging materials like reflective surfaces, glass, and uniform textures that typically confuse standard photogrammetry approaches.
Automated Inspection Maps
Scene-specific recognition algorithms automatically generate equipment spatial maps without manual positioning, optimizing inspection route planning.
Collision & Occlusion Calculation
Automatically generates grid data for collision detection and occlusion analysis, fully addressing spatial computing needs in inspection scenarios.
Hardware

Lixel L Series
High-Precision 3D Scanner
Learn More >

Lixel K Series
Compact 3D Scanner
Learn More >
Software

LixelStudio
Point Cloud Studio
Learn More >

Lixel CyberColor
Next-Gen 3D Content Format
Learn More >
Workflow
Case Studies
LCC's Integration with NVIDIA Isaac Sim

Urban Design: How ISL Used XGRIDS 3DGS to Transform Stakeholder